OVERVIEW:
People protect their property in many different ways. One way they can do that is to equip fancy security systems. Those things are expensive, though. Therefore, in this project, we will use an Arduino, a piezo buzzer, and a servo motor to make a cheap security system to protect our valuable stuff.
A special thing in this project that interests me is the creative use of the piezo buzzer. Usually, we use the buzzer to make a sound as I demonstrated in light theremin and keyboard instrument. But now, we use it as a microphone. We are taking advantage of the processor’s capability to read analog signals through its ADC. In this case, we transform the intensity of the sound we knock into a value in the range 0..1024, in which 0 represents 0V, and 1024 represents 5V at the input of the six analog pins.
Because the piezo buzzer is very sensitive to sound, we will use a 1-megaohm resistor so that we don’t have to have 100% accuracy on our knocks.
PARTS:
- 1 x Arduino UNO
- 1 x Breadboard
- 1 x Piezo buzzer
- 1 x 1-megaohm resistor
- 1 x Servo motor
- 1 x 100-microFarad capacitor
- 1 x Switch
- 1 x 10-kilohm resistor
- 3 x LEDs (red, yellow, green)
- 3 x 220-ohm resistors
- Many jumper wires
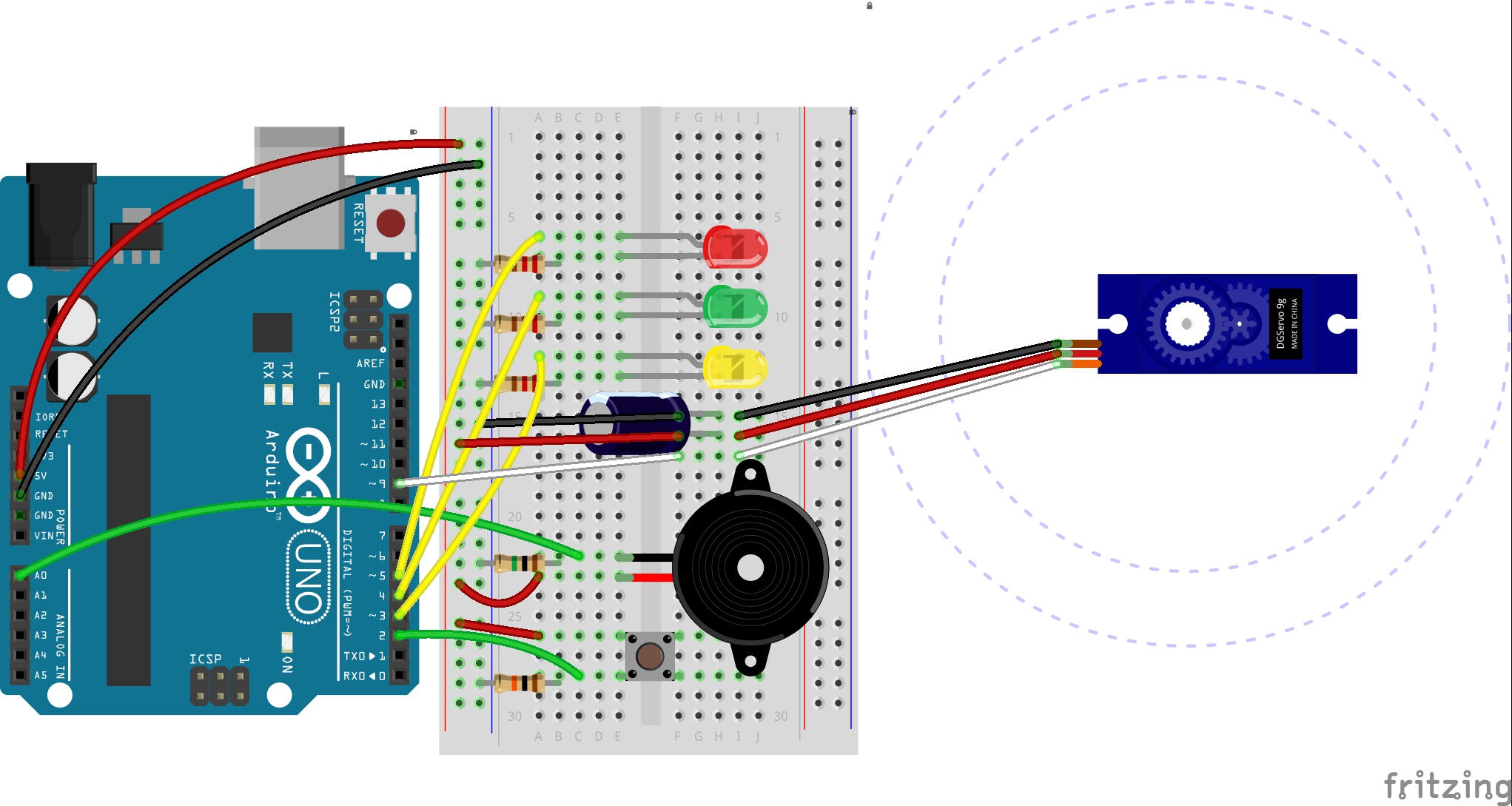
CIRCUIT LAYOUT:
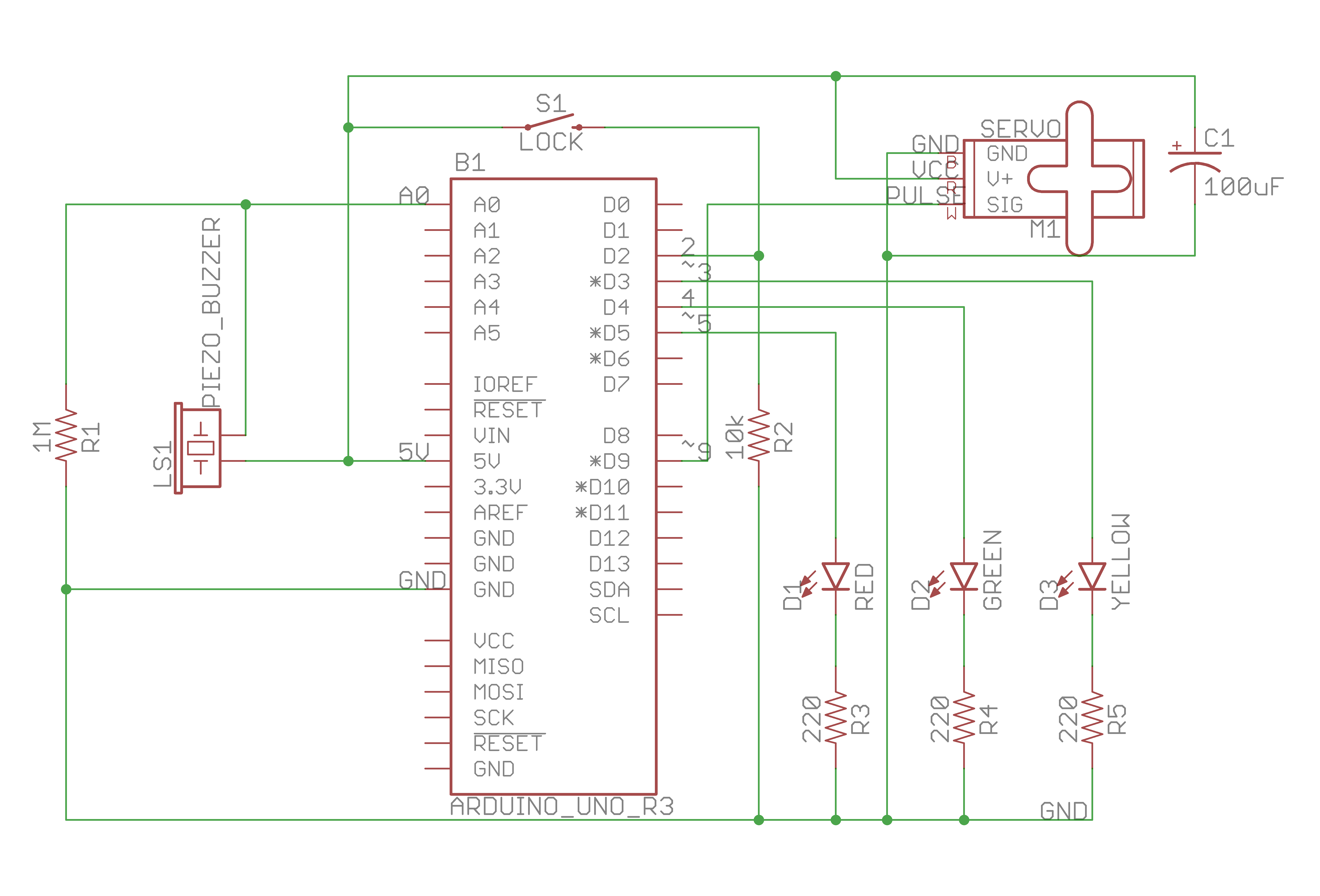
When connecting the buzzer, note that there may be a plus(+) on one lead, indicating VCC. We should connect that lead to +5V of the Arduino, and the other lead through the 1-megaohm resistor to A0 and GND. If both leads of the buzzer are the same, we can plug the buzzer in the breadboard either way.
Also, the VCC lead, the PULSE lead, and the GND lead should be connected to +5V, a PWM pin (in this case ~9), and GND of the Arduino, respectively. Because it draws a lot of currents when moving, we must connect a 100-microFarad parallel to the servo.
Here is my schematic:
And this is my breadboard layout:
CODE:
We first encounter function in this project. Instead of writing our code repetitively, we will only write those lines of code once in a function and call that function over and over again. Functions are good for us because we are not only able to reuse the code but also make our main code more readable.
Here is the code:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
/**
* Project Name: Arduino Projects Book - Project 12: Knock Lock
*
* File Name: knock_lock.ino
*
* Description: Uses the Piezo buzzer to make a secret locking mechanism in
* order to keep intruders out.
*
* Author: Zhengqi Dong
* Location:
* Created: September 06, 2016
* Updated: June 22, 2017
*/
#include Servo.h
Servo ServoMotor;
// Required hardware I/O connections
const byte PIEZO_PIN = A0; // the pin piezo buzzer connected to
const byte SWITCH_PIN = 2; // the pin switch connected to
const byte YELLOW_LED_PIN = 3; // the pin yellow LED connected to
const byte GREEN_LED_PIN = 4; // the pin green LED connnected to
const byte RED_LED_PIN = 5; // the pin red LED connected to
const byte SERVO_PIN = 9; // the pin servo motor connected to
// Global constants
const unsigned short BAUD_RATE = 9600;
const byte QUIET_KNOCK_VAL = 30;
const byte LOUD_KNOCK_VAL = 50;
const byte MAX_NUM_KNOCK = 5;
// Global variables
byte switch_val;
byte knock_val;
boolean is_locked = false;
byte num_knocks = 0;
void setup() {
ServoMotor.attach(SERVO_PIN);
pinMode(SWITCH_PIN, INPUT);
pinMode(YELLOW_LED_PIN, OUTPUT);
pinMode(GREEN_LED_PIN, OUTPUT);
pinMode(RED_LED_PIN, OUTPUT);
Serial.begin(BAUD_RATE);
// unlock the box first
digitalWrite(GREEN_LED_PIN, HIGH);
ServoMotor.write(0);
Serial.println("ACCESS GRANTED");
}
void loop() {
if (is_locked == false) {
switch_val = digitalRead(SWITCH_PIN);
if (switch_val == HIGH) {
LockTheBox();
}
} else {
knock_val = analogRead(PIEZO_PIN);
// require MAX_NUM_KNOCK valid knocks
if ((num_knocks < MAX_NUM_KNOCK) && (knock_val > 0)) {
if (CheckForKnock(knock_val) == true) {
num_knocks++;
}
Serial.print("Need ");
Serial.print(MAX_NUM_KNOCK - num_knocks);
Serial.println(" more knock(s)");
}
if (num_knocks >= MAX_NUM_KNOCK) {
UnLockTheBox();
// reset num_knocks
num_knocks = 0;
}
}
}
/**
* Changes the LEDs and turn the servo to unlock the box.
*/
void UnLockTheBox(void) {
// change the is_locked value
is_locked = false;
// indicate on LEDs
digitalWrite(RED_LED_PIN, LOW);
digitalWrite(GREEN_LED_PIN, HIGH);
// rotate the servo to 0 degree
ServoMotor.write(0);
// print a message on the Serial Monitor
Serial.println("ACCESS GRANTED");
// allow time for the servo to completely move
delay(20);
}
/**
* Changes the LEDs and turn the servo to lock the box.
*/
void LockTheBox(void) {
// change is_locked value
is_locked = true;
// indicate on LEDs
digitalWrite(GREEN_LED_PIN, LOW);
digitalWrite(RED_LED_PIN, HIGH);
// rotate the servo to 90 degrees
ServoMotor.write(90); // rotate the servo 90 degrees to lock
// print a message on the Serial Monitor
Serial.println("ACCESS DENIED");
// allow time for the servo to completely move
delay(20);
}
/**
* Checks to see if a knock is valid or not.
*
* @param a_knock_val the loudness of the knock
*
* @return true if a valid knock, false otherwise
*/
boolean CheckForKnock(byte a_knock_val) {
if ((a_knock_val > QUIET_KNOCK_VAL) && (a_knock_val < LOUD_KNOCK_VAL)) {
digitalWrite(YELLOW_LED_PIN, HIGH);
delay(50);
digitalWrite(YELLOW_LED_PIN, LOW);
Serial.print("Valid knock value: ");
Serial.println(a_knock_val);
return true;
} else {
Serial.print("Invalid knock value: ");
Serial.println(a_knock_val);
return false;
}
}
